HOBBYEAGLE A3 Super 4 Flig 遙控飛機

感謝您購買我們的產品。 A3 Super 4 是專為遙控飛機設計的高性能和功能性 6 軸陀螺儀和穩定器。 為了您能充分利用陀螺儀並安全飛行,請仔細閱讀本使用說明書並按如下所述設置設備。
重要注意事項
- 無線電遙控 (R/C) 模型不是玩具! 螺旋槳高速旋轉,存在潛在危險。 它們可能因使用不當而造成嚴重傷害。 必須遵守遙控模型的通用安全規則和當地法律。 首次使用陀螺儀之前,請仔細閱讀以下說明,並根據本手冊仔細設置陀螺儀。 我們還建議您在第一次嘗試使用我們的陀螺儀飛行之前尋求經驗豐富的飛行員的幫助!
- 上電後,陀螺儀需要進行精確的陀螺儀校準,上電後保持飛機靜止,等待LED藍燈閃爍。 如果檢測到輕微移動,LED 將保持藍色常亮,並且在您停止移動飛機之前不會開始校準,但是,在初始化期間不需要使飛機保持水平。
- 陀螺儀校准後還需要對中桿。 開機前務必將所有搖桿置於中位(油門搖桿處於最低位置),初始化完成前請勿移動搖桿。 搖桿居中僅適用於副翼、升降舵、方向舵、副翼 2 和升降舵 2 通道。 務必在安裝後檢查副翼、升降舵和方向舵的陀螺儀方向,並始終在每次飛行前對其進行測試。 陀螺儀的相反反應可能導致失控甚至墜毀!
- 建議使用隨附的 3300uF/16V 電容以獲得更穩定和安全的工作電壓tage 安裝陀螺儀後。 電容器可以插入陀螺儀或接收器的任何一個自由連接器上。
安裝
筆記
- 切勿使用熱熔膠或尼龍紮帶將陀螺儀固定在飛機上!
- 每次只需要一塊雙面膠,太軟或太厚的安裝類型都會影響陀螺儀的性能。
- 陀螺儀是感應裝置,請在陀螺儀周圍留出足夠的空間,並使陀螺儀盡可能遠離其他電子設備或電線。
安裝方向
使用提供的其中一種雙面膠帶將陀螺儀牢固地固定到飛機上。 為獲得最佳性能,陀螺儀應安裝在盡可能靠近重心的位置,並且外殼邊緣必須與飛機的所有三個旋轉軸完全平行。 陀螺儀可以平貼,也可以豎貼,也可以倒貼,但一定要確保貼紙上的箭頭始終指向航向方向,否則陀螺儀在ANGLE、LEVEL和HOVER模式下將無法正常工作。
接收器連接
標準 PWM 接收器
使用標準 PWM 接收器時,A3S4 有 7 個輸入通道,其中副翼(A)、升降舵(E)和方向舵(R)至少有一個通道連接到接收器,否則陀螺儀將進入接收器超時模式(紅色慢閃)。 輸入通道的說明如下表所示。
筆記
- 【Serial RX/M】用於飛行模式切換,在飛行過程中使用發射器的三位開關切換飛行模式。
- [G] 用於遠程主增益控制,在飛行過程中可以通過發射器的滑桿或開關來調整或改變主增益。
- 直接將電調或油門舵機連接到接收器,無需經過陀螺儀。
- 插槽 [AER] 和 [A2-E2-G] 上的引腳僅用作信號輸入引腳,切勿在這些引腳上連接電源。
- 注意插頭的極性。 橙色信號線必須始終在頂部,棕色在底部。
單線接收器
A3S4 支持 PPM 和多協議數字串行接收器,允許您使用插槽 [Serial RX/M] 上的一根單線將接收器連接到陀螺儀。 使用單線接收機時,有2個輔助直通通道(AUX1和AUX2)可用,可直接輸出接收機的預期通道。 默認情況下,AUX1 始終分配給 Throttle 並應用於 OUT5,而 AUX2 被禁用。 在單線模式下運行時,陀螺儀使用預設頻道分配來識別來自接收器的頻道。 請通過配置器或編程卡檢查當前通道映射是否與您的發射器的通道順序匹配。 每次更改接收器類型後,您都可以選擇重置頻道或保留現有設置。 為您不使用的那些頻道選擇“無”。
表 1:支持的串行接收器協議和默認通道分配

筆記
- 請注意,ELE2、GAIN 和 AUX2 的輸入通道在單線模式下默認禁用。 要啟用這些通道,您需要通過配置器或編程卡為它們指定通道號。
- 注意插頭的極性。 橙色信號線必須始終在頂部,棕色在底部。
- 如果您想使用 Spektrum 衛星(遠程)接收器或 SRXL2 遠程接收器,則需要一個特殊的可選適配器或轉換器。
Spektrum DSM2/X 衛星接收器
通過使用 DSM 適配器,Spektrum 衛星(遠程)接收器可以直接連接到陀螺儀。

Spektrum SRXL2 接收器
通過使用SRXL2 Adapter,A3S4支持Spektrum最新的SRXL2串口接收器,如SPM4651T、SPMAR8020T等。請注意,使用SRXL2 Adapter時,陀螺儀的接收器類型必須設置為SBUS模式。
關於故障保護
- 接收器故障保護 大多數接收器會在發射器信號丟失的情況下進入故障保護模式。 在這種情況下,陀螺儀將受益於接收器的本機故障保護/保持功能。 始終確保在變送器中正確設置了故障安全設置。
- Gyro Failsafe 陀螺儀還提供陀螺級Failsafe 功能,當接收器連接失敗時。 開啟該功能後,LED 會紅燈慢閃,所有舵機在啟動時都會移動到初始位置,包括 AUX1 和 AUX2 通道,陀螺儀會自動切換到正常模式,遠程主增益將被禁用。
輸出連接
輸出函數
A3S4 提供 5 個定制的 PWM 輸出通道,包括 OUT1 到 OUT5,其功能可由用戶指定。 可用功能如下表所示。
表 2:輸出函數

筆記:
是標準 PWM 接收器模式的默認設置。 AUX1 和 AUX2 在標準 PWM 接收模式下均無效。 默認情況下,OUT5 始終預設為以 PPM 或串行接收器模式輸出 AUX1 通道。
伺服反向
伺服反向功能設計用於反向伺服,例如amp即,當在單副翼控制模式下操作陀螺並連接兩個副翼舵機時,如果在機翼的一側使用反向舵機,則無法單獨反向舵機。 在這種情況下,陀螺儀提供的伺服反向功能可以輕鬆改變其中一個舵機的方向。 這同樣適用於兩個升降舵機、三角翼的兩個機翼舵機或 V 型尾翼飛機的兩個尾翼舵機等應用。
翼型和伺服連接
A3S4支持標準固定翼、飛翼(三角翼)和V型尾翼。 始終關閉發射機中三角翼或 V 尾的混音功能,因為陀螺儀會自行提供此類混音功能。 檢查發射器的伺服監視器並確認每個搖桿只控制一個通道。
標準固定翼

- 使用單副翼輸入時,將兩個副翼舵機的輸出功能設置為“AIL+AIL”或“AIL+AIL2”。 如果在機翼的一側使用反向舵機,請使用陀螺儀的舵機反向功能將其反向。
- 使用雙副翼輸入時,將兩個副翼舵機的輸出功能設置為“AIL+AIL2”。
- 這同樣適用於電梯伺服連接。
飛翼(三角翼)
- 將兩個舵機的輸出功能設置為“AIL+ELE”。 如果在機翼的一側使用反向舵機,請使用陀螺儀的舵機反向功能將其反向。
- “AIL2”和“ELE2”功能分別控制,可用於鴨式或其他用途。
V型尾

- 使用單副翼輸入時,將兩個副翼舵機的輸出功能設置為“AIL+AIL”或“AIL+AIL2”。 如果在機翼的一側使用反向伺服,請使用陀螺儀的伺服反向功能將其反向。 使用雙副翼輸入時,將兩個副翼舵機的輸出功能設置為“AIL+AIL2”。
- 將兩個尾部舵機的輸出功能設置為“ELE+RUD”,如果尾部一側正在使用反向舵機,請使用陀螺儀的舵機反向功能進行反向。
- “ELE2”功能單獨控制,可用於鴨式或其他用途。
單/雙副翼(升降舵)控制
- 當只連接一個副翼輸入時,陀螺儀工作在單副翼控制模式。 AIL 和 AIL2 的兩個輸出通道都為副翼舵機發出相同的信號,就像 Y 延長線的工作原理一樣。 在使用反向舵機時,可以使用陀螺儀提供的舵機反向功能來進行舵機的反向操作。
- 如果兩個副翼輸入都連接,陀螺儀工作在雙副翼控制模式,在這種模式下,AIL和AIL2的輸出通道分開操作。
- 這同樣適用於電梯
飛行模式
A3S4 提供 6 種飛行模式,可在飛行過程中切換為 3 位模式(或 6 位模式)。 可以通過配置器或編程卡指定與開關的每個位置相關的預期飛行模式。 在 3 位模式下,默認設置為 OFF – NORMAL – LEVEL。 LED 的顏色顯示陀螺儀在使用時的當前飛行模式。
表 3:飛行模式 LED 顏色

- 陀螺儀關閉模式
在 GYRO OFF 模式下運行時,陀螺儀將完全停用,飛機將完全在您的發射機的控制下,就像安裝陀螺儀之前一樣。 此模式通常僅用於測試目的。 - 正常模式
NORMAL模式,也稱為“速率模式”,是陀螺儀最基本的功能。 它基於飛機每個軸的旋轉速率控制工作。 在此模式下操作時,陀螺儀只會校正當前發生的旋轉運動,當飛機在相應軸上旋轉時,舵機會產生瞬時反應,一旦飛機停止旋轉,舵機就會回到中立位置。 NORMAL 模式可用於幾乎任何尺寸和類型的飛機。 它可以有效提高飛機的穩定性和精度,特別是減少失速點。 - 鎖定模式
LOCK 模式也稱為“姿態鎖定模式”、“3D 模式”或“AVCS 模式”。 與正常模式不同,陀螺儀將不斷地對每個軸上的旋轉運動進行永久校正。 也就是說,當您鬆開操縱桿時,飛機將立即停止並保持其當前位置。 此模式非常適合練習基本的 3D 動作,例如懸停或刀刃。 由於它可以幫助您鎖定飛機的姿態,因此對著陸也有幫助。 - 角度模式(前教練
ANGLE 模式,也稱為“教練模式”或“姿態模式”,將限制飛機在橫滾軸和俯仰軸上的最大角度。 在此模式下不允許滾動和循環,飛機將始終保持穩定,與任何操縱桿輸入無關。 這可以防止飛機傾斜到可能導致危險的更大角度。 只要鬆開搖桿,飛機就會自動回到水平位置。 您可以將此模式用作緊急救援,或用於其他應用,例如,為新手進行培訓或用於 FPV。 該模式的最大允許角度可以通過配置器或編程卡指定。 - 水平模式
LEVEL 模式也稱為“Auto-Level 模式”、“Auto-Balance 模式”或“Horizon 模式”。 在此模式下操作時,當您鬆開搖桿時,飛機將自動回到水平位置。 與 ANGLE 模式不同的是,該模式沒有最大角度限制,只有當副翼和升降桿沒有特定的控制輸入時,飛機才會穩定。 如果飛行員迷失方向並希望避免飛機墜毀,則可以使用此模式。 - 懸停模式
HOVER 模式,也稱為“自動懸停模式”,提供與 LEVEL 模式相同的功能。 唯一的區別是當你鬆開搖桿時,飛機將被帶到垂直位置(機頭向上)並保持懸停。 此模式旨在幫助您學習懸停機動並降低墜機概率。 - 用戶模式
用戶定義模式允許您分別決定在每個軸上使用哪種飛行模式。 請注意,懸停模式不適用於用戶模式。
飛行模式開關的設置
您可以使用發射器的任意三位開關切換飛行模式。 最簡單的方法是使用Gear Channel並將其連接到陀螺儀的[Serial RX/M]插槽。 為了使陀螺儀能夠識別正確的位置,PWM 輸入必須滿足如下所示的範圍要求:
A3S4還支持6位飛行模式切換,讓你在飛行中切換所有飛行模式。 為此,您的變送器需要一個 2 位開關和一個 3 位開關的混合功能。 為了使陀螺儀能夠識別正確的位置,PWM 輸入必須滿足如下所示的範圍要求:
要實現 6 位邏輯開關,您的發射機需要支持節目混合功能,大多數先進的收音機都為您提供此類功能。 請參考我們的 web網站為前amp介紹如何為一些流行的收音機設置混音。
增益調整
基本增益
A3S4 提供對副翼、升降舵和方向舵基本增益的單獨調整。 基本增益決定了陀螺儀的反應強度。 一般情況下,增益越高,飛機旋轉後越難停下,飛機飛行越穩定、越精準。 但是如果增益太高,飛機將傾向於在相應的軸上以高頻振盪。 如果太小,操作和穩定性都不太好,飛機不能精確停止和超調。 如果將基本增益設置為 0%,陀螺儀將完全停用。 對於第一次飛行測試,建議從較低的基本增益設置(例如 30%)開始並將陀螺儀切換到正常模式。 如果飛機開始振盪,則降低相應軸的增益。 如果感覺控制無力和不精確,並且在停止時沒有保持位置,則增加增益,根據這種方法,微調基本增益,直到獲得最佳性能。
模式增益
此外,每個軸的陀螺增益也可以針對每種飛行模式單獨調整,包括鎖定增益、角度增益、水平增益和懸停增益,這些增益通常在基本增益設置好後使用,並且只與對應的飛行模式。
遠程主增益
遠程主增益用於在飛行中同時改變副翼、升降舵和方向舵的基本增益。 通過使用發射器上的滑動桿,增益率可以從 100% 線性降低到 0%,您也可以使用 3 位開關來獲得 3 個增益率選擇。 如果您不連接此通道,遠程主增益將始終默認為 100%。
陀螺儀方向
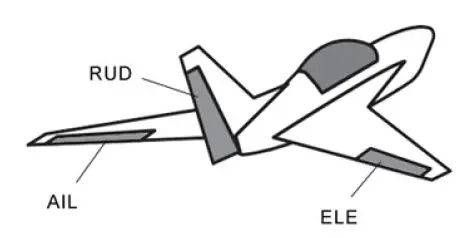
安裝完成後,將飛機抬起,使其分別繞橫滾軸、俯仰軸和偏航軸快速旋轉。 參考下圖,確保所有控製表面的反應方向正確。
非常重要!
在飛行前確保陀螺儀在每個軸上的正確方向上做出反應是非常重要的。 陀螺儀的相反反應可能會導致失控甚至墜毀!
檢查副翼的陀螺儀方向
圍繞橫滾軸快速向左或向右旋轉飛機,副翼應按預期方向做出反應,如下圖所示。
檢查電梯的陀螺方向
快速繞俯仰軸上下旋轉飛機,升降舵應按預期方向做出反應,如下圖所示。
檢查方向舵的陀螺儀方向
繞偏航軸快速向左或向右旋轉飛機,方向舵應向預期方向做出反應,如下圖所示。
水平和懸停校準
在 ANGLE 模式或 LEVEL 模式下飛行時,陀螺儀需要知道飛機在橫滾和俯仰兩個方向的角度,這是通過計算自身的姿態來實現的。 在 ANGLE 模式或 LEVEL 模式下飛行時,安裝引起的小角度偏差可能會導致意外行為。 為此,建議進行水平校準以抵消安裝造成的誤差,並在安裝陀螺儀後建立適當的飛機水平基準。
- 校準前,應將飛機置於水平地面上,並使機翼與地面平行。 使飛機稍微機頭向上,因為大多數飛機通常需要一定的仰角來保持水平飛行。
- 單擊配置器傳感器選項卡上的液位校準按鈕開始校準。 整個校準過程將花費您幾秒鐘的時間,並且 LED 在校準過程中會快速閃爍藍色。 在校準完成之前不要移動飛機。
- 校準成功後,結果將被保存並顯示在屏幕上,您可以在以後手動調整它們。 如果在校準過程中出現紅燈快速閃爍,則表示結果超過了最大允許值(即±25deg),此時必須重新安裝陀螺儀,以減少安裝造成的偏差。
同理,如果您想使用 HOVER 模式飛行,建議在安裝後執行懸停校準。 該過程與水平校準的過程非常相似。 唯一的區別是飛機應垂直提升到地面,而不是在步驟 1 中將其放在地面上。
加速度計校準
每個陀螺儀在出廠前都經過仔細的測試和校準。 通常,您不需要再次對加速度計進行校準。 但是,在某些特定情況下,我們建議您重新校準加速度計以獲得更好的性能,這些包括溫度變化可能會導致傳感器的機械特性發生變化,或者更換新的傳感器等。校準應該是在水平桌面上完成,陀螺儀需要先從飛機上拆下。 校準程序 將陀螺儀連接到 PC 並等待初始化完成。 打開配置器並轉到傳感器 -> 加速度計校準選項卡,單擊校準按鈕。 按照提示完成接下來的 6 個步驟,每一步校準時不要移動陀螺儀。
進階設定
堅持死區
搖桿死區是搖桿中心周圍陀螺儀不會反應的範圍。 有的發射機存在輸入後搖桿回位時與之前的中心位置不完全一致的問題,可能會產生相應功能的偏差,此時可增加搖桿死區的設置要解決這個問題。 死區的調整範圍為 0% 到 20%,默認 5% 適合大多數收音機,無需修改。
伺服頻率
設置舵機的工作頻率。 模擬舵機只能在 50Hz 下工作,高頻可能會損壞舵機。 在增加設置之前檢查伺服規格,如果您不知道伺服系統允許的最大更新速率永遠不會超過 50Hz。 理論上舵機的工作頻率越高可以獲得更好的陀螺性能,但可能會增加功耗並導致舵機發熱。 此設置將影響所有輸出通道,包括 AUX1 和 AUX2。
增益電平
更改基本增益的級別,默認的“中”適用於大多數飛機。
控制行為
安裝陀螺儀後,由於陀螺儀的修正,飛機會變得更穩定,但反應更差。 為了改進,我們需要在有搖桿輸入時動態降低陀螺儀在所需方向上的校正強度。 此功能允許您通過選擇不同的增益衰減曲線來更改控制行為。
陀螺數字濾波器
該功能用於設置陀螺儀硬件低通濾波器的截止頻率。 降低頻率可以顯著降低機身振動的干擾。 經測試,默認設置DLPF_20Hz適用於大部分電動飛機。 振動較大時適當降低,在硝基或汽油飛機上使用陀螺時建議選擇DLPF_5Hz。 請注意,較高的截止頻率設置可能會增加功耗並導致伺服器發熱。
程式設計
要設置陀螺儀,請從我們的網站下載並安裝最新的 HobbyEagle A3 配置器和 USB 驅動程序 web網址為 https://www.hobbyeagle.com/a3-configurator/
- 該軟件支持 Windows XP、Windows 7、Windows 8 和 Windows 10(32 位或 64 位)。
- 如果安裝失敗,請先下載並安裝 Microsoft .NET Framework 4。
- 在將陀螺儀連接到 PC 之前,請安裝 USB 驅動程序(CP210X_VCP)。
相關文件
安裝指南 https://www.hobbyeagle.com/a3-configurator/docs/installation_guide_en.pdf
USB驅動安裝指南 https://www.hobbyeagle.com/a3-configurator/docs/usb_installation_guide_en.pdf
快速入門指南 https://www.hobbyeagle.com/a3-configurator/docs/quick_start_guide_en.pdf
固件更新指南 https://www.hobbyeagle.com/a3-configurator/docs/firmware_update_guide_en.pdf
非常重要!
- 將陀螺儀連接到 PC 或編程卡時,始終使用包裝中包含的特殊 USB 適配器和數據線。 手機或其他產品常用的USB線不能與我們的陀螺儀配合使用!
- A3超4推薦使用新的Program Card X,並保持固件更新到最新版本。
規格

文件/資源
 |
HOBBYEAGLE A3 Super 4 飛行控制器 6 軸陀螺儀和穩定平衡器全套編程卡適用於遙控飛機 [pdf] 使用者手冊 A3 Super 4飛控6軸陀螺儀和平衡器全套編程卡,適用於遙控飛機,A3 Super 4,飛控6軸陀螺儀和平衡器全套編程卡,適用於遙控飛機 |



