![]() 使用者手冊
使用者手冊![]()

版權聲明
未經深圳市大像機器人科技有限公司書面許可,任何單位和個人不得提取、編譯、翻譯或複製本手冊的任何內容(如:技術文檔、軟件等),也不得以任何形式(包括資料和出版物)傳播。 ., Ltd.(以下簡稱“大像機器人”)。
此外,本手冊中提及的產品信息及相關資源僅供參考,內容如有更改,恕不另行通知。
除本手冊明確說明外,本手冊中的任何內容均不應解釋為 Elephant Robotics 對個人損失、財產損失或適用於特定用途的任何保證或保證。 版權所有!
|
版本 |
描述 |
筆記 |
| V 2020.12.31 | 新增 myCobot【標準套裝】、底座組件、端部組件圖片 | |
| V 2021.02.04 | 添加了坐標系的圖片,MyStudio軟件 |
超過view
關於手冊
歡迎使用 MyCobot 協作機器人,感謝您的購買。
本手冊介紹了正確安裝和使用 MyCobot 的注意事項。 在安裝本機器人系統之前,請仔細閱讀本手冊及其他相關手冊。 閱讀後請妥善保管,以便隨時取用。 閱讀手冊的對象
本手冊適用於:
- 安裝程式。
- 偵錯工具.
- 維修人員。
 |
安裝/調試/維護MyCobot協作機器人的人員必須接受過大像機器人的培訓,並具備上述工作所需的機械和電子知識。 |
如何使用
進行以下工作時應使用本手冊:
- 安裝工作:將機器人移至工作位置,按照安裝說明固定在底座上。
- 調試:調試機器人工作狀態。
- 維護工作:定期維護機器人系統,確保其正常運行。 當機器人因環境影響或用戶操作不當導致故障,或機器人系統的某個部件超過正常使用壽命時,需要對機器人進行維修。
筆記:
- 本手冊適用於國際用戶,也適用於港澳台地區用戶。
- 本手冊不定期更新。 更新日期為版本號。 用戶可以從官方下載最新版本 web大像機器人現場隨時。
安全
本章詳細介紹了對機器人進行安裝、維護和維修工作的人員的一般安全信息。 請在搬運、安裝、使用前閱讀並理解本章內容及注意事項。
1.1 危險識別
協作機器人的安全性是建立在正確配置和使用機器人的前提下,即使遵守了所有的安全說明,操作人員造成的傷害或損壞仍有可能發生。 因此,了解機器人使用的安全隱患非常重要,有利於防患於未然。
下表1-2~4是使用機器人時可能存在的常見安全隱患:
表格 1- 2 危險的安全隱患
 |
|
| 1 | 機器人搬運過程中因錯誤操作造成的人身傷害或機器人損壞。 |
| 2 | 未按要求固定機器人造成人身傷害或機器人損壞,例如ample,螺絲未擰緊,底座不足以穩定支撐機器人高速運動,導致機器人傾倒。 |
| 3 | 未對機器人進行正確的安全功能配置,或未安裝安全保護工具等,可能會導致機器人的安全功能失效。 |
表 1- 3 警告級別的安全風險
 |
|
| 1 | 與機器人玩耍,您可能會被正在運行的機器人撞到,或被電纜等障礙物絆倒而造成人身傷害。 |
| 2 | 未經授權的人員更改安全配置參數,導致安全功能失效或發生危險。 |
| 3 | 划痕和刺破是由鋒利的表面造成的,例如工作環境中的其他設備或機器人末端執行器。 |
| 4 | 機器人是精密機械,踩踏可能會損壞機器人。 |
|
5 |
如果clamp 未到位或在關閉機器人電源或關閉氣源之前(未確定末端執行器是否牢牢抓住物體而不會因斷電而脫落)。 如果 clamp物件不移走,可能會造成危險,如撞車傷人。 |
| 6 | 機器人有意外移動的風險。 在任何情況下,您都不應站在機器人的任何軸下! |
| 7 | 機器人是精密機器。 如果在搬運過程中放置不順暢,可能會引起振動,並可能導致機器人內部部件損壞。 |
表 1- 4 可能導致觸電的安全隱患
 |
|
| 1 | 使用非原裝電纜可能會造成未知危險。 |
| 2 | 電氣設備與液體接觸可能導致漏電危險。 |
| 3 | 如果電氣連接不正確,可能會有觸電危險。 |
| 4 | 務必在關閉控制器及相關設備的電源並拔下電源線後進行更換工作。 如果在通電狀態下進行作業,可能會導致觸電或故障。 |
1.2 安全注意事項
使用我的機器人時應遵循以下安全規則:
- 菌群是電氣設備。 非專業技術人員不能改裝電線,否則容易傷及設備或人身。
- 本手冊中的危險、警告標記僅作為安全預防措施的補充。
- 請在特定環境範圍內使用菌群。 否則,超過規格和負載條件會縮短產品的使用壽命,甚至損壞設備。
- 在操作和維護菌群之前,必須對負責安裝、操作和維護的人員進行培訓,了解各種安全注意事項和正確的操作和維護方法。
- 不要在廣告中使用菌群amp 為避免長時間環境損壞,myCobot 屬於精密電子元件。
- 不要在高溫環境中使用菌群。 菌群的外表面是以光敏樹脂為原料製成的,高溫會損壞外殼並導致失效。
- 高腐蝕性清潔不適合清潔菌群。 陽極氧化部件不適合浸泡清洗。
- 請勿在沒有安裝底座的情況下使用我的機器人,以免損壞設備或發生事故。 myCobot 應在固定且不顯眼的環境中使用。
- 請勿使用其他電源適配器為 myCobot 供電 如果因使用不合格的適配器而損壞,將不包括在售後服務範圍內。
- 請勿拆卸或擰下螺絲及其外殼。 如果打開,則無法提供保修服務。
- 沒有經過專業培訓,人們無法修復 myCobot。 如果我的機器人出現問題,請及時聯繫myCobot技術支持工程師。
- 請遵守相關法律處理報廢的菌群,保護環境。
- 不要讓孩子單獨玩我的機器人。 所有進程都需要在運行時進行監控。 流程完成後,請及時關閉設備。
- 禁止修改或拆除機械臂及相關設備上的銘牌、說明、圖標、標記。
- 請勿將其他產品驅動程序燒錄到終端 Atom。 如果因此造成設備損壞,則不包括在售後服務範圍內。
請不要將 Chatbot 協作機器人用於以下目的。 - 醫療和生命攸關的應用。
- 在可能引起爆炸的環境中。
- 直接使用,無需風險評估。
- 安全功能等級使用不足。
- 機器人性能參數的使用不一致。
如果您對本手冊有任何疑問,請訪問並提交您的反饋意見:https://www.elephantrobotics.cn.
1.3 使用場景
關於菌群
2.1 背景
秉承“享受機器人世界”的使命,大像機器人設計開發了世界上最小、最輕的協作機器人mycobiota,保留了工業機器人的大部分功能。 緊湊優雅的工業設計、卓越強大的性能、巨大的軟硬件開發空間,讓myCobot在應用擴展上擁有無限可能。
菌群的設計原型來自大像機器人於2018年在中國推出的一體化機器人,作為國內第一款集成協作機器人,曾榮獲2019中國工業機器人學會工業機器人創新獎和2019高新技術機器人年度“創新獎”技術沃德”,並已遠銷國內外30多個國家,得到世界500強企業工廠的一致好評和認可。
2.2 簡介
mycobiota是世界上最小、最輕的六軸協作機器人,由大像機器人和M5Stack聯合生產。 它不僅僅是一個充滿想像力的生產力工具,可以根據用戶的需求進行二次開發,實現個性化定制。
myCobot自重850g,有效載荷250g,臂長350mm,體積小巧但功能強大,不僅可以搭配多種末端執行器,適應不同的應用場景,還支持二次開發多平台軟件,滿足科研教育、智能家居、輕工、商業應用等多種場景需求。
myCobot – 基本參數
| 自由度 | 6 |
| 有效載荷 | 250克 |
| 臂展 | 350毫米 |
| 工作半徑 | 280毫米 |
| 重複性 | ±0.5毫米 |
| 重量 | 850克 |
| 電源輸入 | 8V,5A |
| 工作條件 | -5°~45° |
| 溝通 | USB Type-C |
2.3 特點
- 獨特的工業設計和極其緊湊
mycobiota 採用一體化模塊化設計,僅重 850g,非常便於攜帶。 其整體機身結構緊湊,零配件少,可快速拆裝更換,實現即插即用。 - 高配置&配備2個屏幕
myCobot包含6個高性能伺服電機,響應速度快、慣性小、平穩
迴轉。 機身搭載2個支持禁食庫的顯示屏,展示擴展應用
場景更容易清晰。 - 樂高連接器&上千個M5STACK生態應用
菌群的底座和末端都裝有樂高連接器,適用於各種微型嵌入式設備的開發。 其底座由M5STACK Basic控制,可直接使用數千個應用案例。 - 塊狀編程和支持工業 ROS
使用 UIFlow 可視化編程軟件,對我的機器人進行編程對每個人來說都簡單易行。
您還可以使用大像機器人的工業機器人軟件RoboFlow,支持Arduino+ROS開源系統的多種功能模塊。 - 跟踪記錄和手工學習
擺脫傳統的點數保存模式,myCobot支持拖動試聽教學,記錄保存的曲目,最多可保存60分鐘不同的曲目,讓新玩家學習輕鬆有趣。
2.4項專利
我的機器人相關專利
|
不。 |
證書編號 | 專利名稱 | 專利號 |
專利權人 |
| 1 | 8194138號 | 機械臂聯動裝置和機械臂 | 中立2018 20017484.4 | 大象機器人 |
| 2 | 8186088號 | 機械臂接頭連接器和機械臂 | 中立2017 21700594.2 | 大象機器人 |
| 不。 | 產品 | 專利類型 | 標題 |
專利號 |
| 1 | 輕型機械臂 | 外觀專利 | 集體機械臂 | 2020030683471.3 |
|
不。 |
發明名稱 |
申請編號 |
| 1 | 一種機器人姿態保持、拖動和示教的方法和系統 | ZL 2018 1 1634649.3 |
| 2 | 一種基於動量模型的機器人在線碰撞檢測方法及系統 | ZL 2019 1 0030748.9 |
| 3 | 一種與關節角加速度無關的機器人動態參數辨識方法 | ZL 2019 1 0773865.4 |
硬體
3.1 控制器和執行器
3.1.1 M5STACK 基本主控制器
M5STACK 基本套件同名,是 M5STACK 開發套件系列中的入門套件。
它是一款模塊化、可堆疊、可擴展和便攜的設備,採用 ESP-32 內核,使其開源、低成本、全功能,便於開發人員在所有設備上處理新產品開發tages包括電路設計、PCB設計、軟件、模具設計和生產。 此基本套件提供友好的價格和功能齊全的資源,使其成為您探索物聯網的良好入門套件。
如果您想探索物聯網原型設計的最快方式,M5STACK 開發板是完美的解決方案。 與其他開發板不同,M5STACK 開發板效率高,覆蓋工業級機箱和基於 ESP32 的開發板。 它集成了 Wi-Fi 和藍牙模塊,並包含一個雙核和 16MB 的 SPI 閃存。 結合 30 多個 M5Stack 可堆疊模塊、40 多個可擴展單元和不同級別的程序語言,您可以在很短的時間內創建和驗證您的物聯網產品。
支持的開發平台和編程語言:Arduino、帶有 UIFlow 的 Blocky 語言、Micropython。 無論您的編程技能水平如何,M5STACK 都會指導您實現您的想法以及最終產品化的每一步。 如果你曾經玩過 ESP8266,你會意識到 ESP32 是 ESP8266 的完美升級。 相比之下,ESP32 有更多的 GPIO、更多的模擬輸入、兩個模擬輸出、多個額外的外圍設備(如備用 UART)。 官方開發平台ESP-IDF已移植FreeRTOS。 使用雙核和實時操作系統,您可以獲得更有條理的代碼和更高速的處理器。
M5STACK Basic 由兩個可分離的部分組成。 上面的部分有各種處理器、芯片和其他一些插槽組件。 M-BUS 插座,以及兩側的可擴展插針。
3.1.1.1 產品特點
- 基於 ESP32
- 內置揚聲器、按鈕、彩色 LCD、電源/重置按鈕
- TF卡槽(最大16G)
- 背面磁吸
- 可伸縮銷和孔
- M-Bus 插座和引腳
- 程序平台:UIFlow、MicroPython、Arduino
3.1.1.2 參數
| 資源 | 範圍 |
| ESP32-D0WDQ6 | 240MHz 雙核、600 DMIPS、520KB SRAM、Wi-Fi、雙模藍牙 |
| 閃光 | 16MB |
| 電源輸入 | 5V@500mA |
| 港口 | TypeC x 1、GROVE(I2C+I/0+UART) x 1 |
| 核心底部端口 | 銷(G1,G2,G3,G16,G17,G18,G19,G21,G22,G23,G25,G26,G35,G36) |
| IPS螢幕 | 2寸,320×240彩色TFT液晶屏,ILI9342C,亮度853nit |
| 揚聲器 | 1W-0928 |
| 按鈕 | 自定義按鈕 x 3 |
| 天線 | 2.4G 3D天線 |
| 工作溫度 | 32°F 至 104°F(0°C 至 40°C) |
| 淨重 | 47.2克 |
| 毛重 | 93克 |
| 產品尺寸 | 54×54×18毫米 |
| 包裝尺寸 | 95×65×25毫米 |
| 錶殼材質 | 塑膠(PC) |
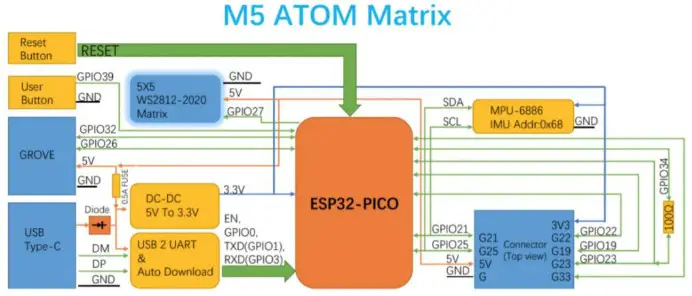
3.1.2 M5STACK 原子
ATOM Matrix 尺寸僅為 24*24mm,是 M5Stack 開發套件系列中最緊湊的開發板。 它提供了更多的GPIO管腳,非常適合手持式和微型嵌入式設備的開發。
主控採用ESP32-PICO-D4芯片,集成Wi-Fi和藍牙技術,集成4MB SPI閃存。 Atom板提供一個紅外LED以及面板上的5 * 5 RGB LED矩陣,內置IMU傳感器(MPU6886)和HY2.0接口。 RGB Led 矩陣下方提供了一個通用可編程按鈕,使用戶能夠為其各種項目添加輸入支持。 板載 USB 接口 (Type-C) 可實現快速程序上傳和執行。 背面提供一個 M2 螺絲孔,用於安裝闆卡。
筆記: 使用機械手時,請避免在機械手末端將固件燒錄到ATOM。 該設備僅支持我們的原始固件。
給您帶來的不便敬請諒解。
3.1.2.1 特點
- 基於 ESP32 PICO
- 可編程按鈕
- 5*5 RGB LED矩陣面板(WS2812C)
- 內置紅外線LED
- 內置MPU6886慣性傳感器
- 可伸縮銷和孔
- 程序平台:Arduino UIFlow
3.1.2.2 規格
| 資源 | 範圍 |
| ESP32 | 240MHz 雙核、600 DMIPS、520KB SRAM、Wi-Fi、雙模藍牙 |
| 閃光 | 4MB |
| 電源輸入 | 5V@500mA |
| 港口 | TypeC x 1、GROVE(I2C+I/0+UART) x 1 |
| 密碼接口 | G19、G21、G22、G23、G25、G33 |
| RGB LED | WS2812C 2020×25 |
| 微機電系統 | 主控板6886 |
| IR | 紅外線傳輸 |
| 按鈕 | 定制底 x 1 |
| 天線 | 2.4G 3D天線 |
| 工作溫度 | 32°F 至 104°F(0°C 至 40°C) |
| 淨重 | 3g |
| 毛重 | 14克 |
| 產品尺寸 | 24×24×14毫米 |
| 包裝尺寸 | 24×24×14毫米 |
| 錶殼材質 | 塑膠(PC) |
3.1.3 伺服電機
myCobot 與 advan 共享 6 個關節中的 6 個高性能伺服舵機tag具有響應快、慣性小、轉動平穩、扭矩穩定等特點。
| 資源 | 範圍 |
| 尺寸 | 23.2*12.1*28.5毫米 |
| 電源輸入 | 4.8~7.4V |
| 工作溫度 | -15~70° |
| 額定扭矩 | 1.5kg.cm@6V |
| 堵轉轉矩 | 4.5kg.cm@6V |
| 旋轉角度 | 300°(可軟件限制角度) |
3.2 機械結構
3.2.1 尺寸和工作範圍
A)菌群
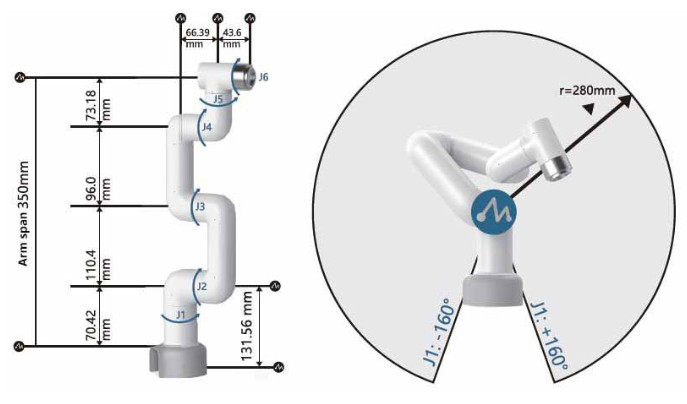
myCobot - 關節運動範圍表
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
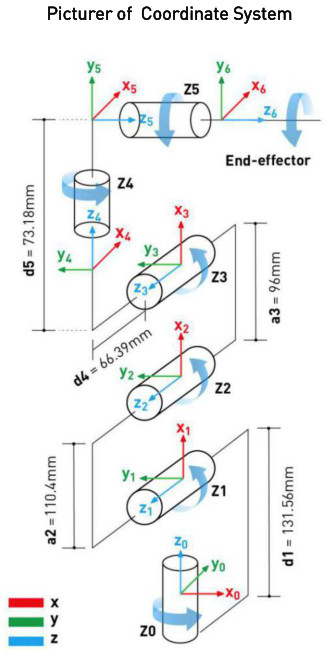
坐標系圖
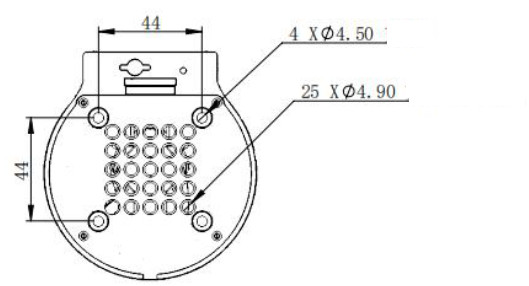
B)底座組裝
該底座與樂高技術組件孔和通孔螺絲孔兼容。
C)端部組裝
末端與樂高技術組件孔和螺紋兼容。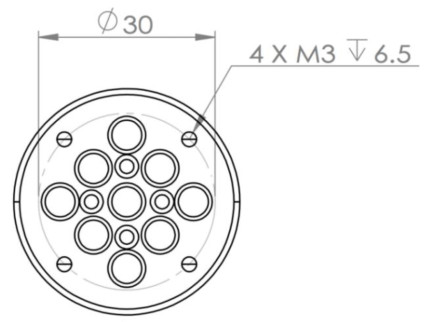
3.2.2 開箱安裝
3.2.2.1 開箱
筆記: 包裝盒就位後,請確認機器人包裝完好無損。 如有損壞,請及時聯繫物流公司和當地供應商。 開箱後,請根據物品清單核對箱內實際物品。

| myCobot【標準套裝】 | -myCobot-280 -宣傳冊 -電源供應 -USB-C 型 - 跳線 -M4*35,不銹鋼螺絲 -六角扳手 |
請將機器人系統安裝在滿足表中所述條件的環境中,以發揮和保持機器的性能並安全使用。
操作環境和條件
| 溫度 | -10℃~45℃ |
| 相對濕度 | 20%~70% |
| 室內/室外 | 室內的 |
| 另一個環境要求 | - 避免陽光。 -遠離灰塵、油煙、鹽、鐵屑等。 - 遠離易燃和腐蝕性液體和氣體。 - 不要與水接觸。 -不傳遞衝擊、振動等。 - 遠離強電磁干擾源。 |
3.2.2.2 安裝
菌群協作機器人的實際重量為850g。 考慮到機器人的運動,重心會隨著機器人的移動而移動。 因此,機器人需要固定在堅固的底座上才能正常使用。
機器人底座接口尺寸:底座固定孔是機器人與其他底座或平面固定的接口。 具體孔尺寸如下所示。 它是4個直徑4.5mm的通孔,可以用M4螺栓固定。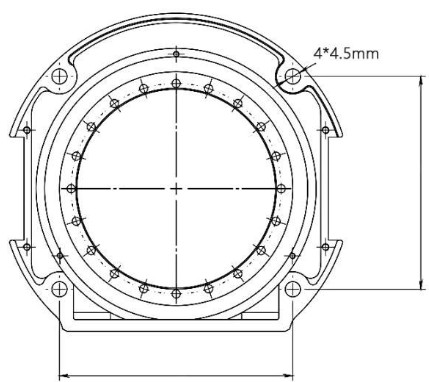
安裝前請確保固定底座上有對應的螺紋孔。 正式安裝前,請確認:
- 安裝環境符合上述要求。
- 安裝位置不小於機器人的工作範圍,並有足夠的空間
用於安裝、使用、維護和修理。 - 將支架放置在適當的位置。
- 安裝相關工具已準備好,如螺絲、扳手等。
確認上述情況後,將機器人移至底座安裝面,調整機器人位置,將機器人底座固定孔對準底座安裝面孔位。
筆記: 調整機器人在安裝底座上的位置時,請避免將機器人直接推到底座的安裝面上,以免劃傷。 手動移動機器人時,請盡量避免對機器人身體的薄弱部位施加外力,以免對機器人造成不必要的傷害。
3.3 電子電氣
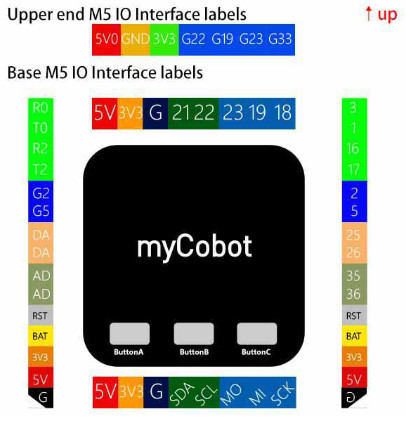
myCobot 有三個外部終端。 它們是底座上 M5Stack Basic 的外部端子、電源插座附近的兩個 Grove 端子和 M5Stack Atom J6 接頭的外部端子引腳。
a)M5STACK 基本電氣圖

b)M5STACK原子電路圖
c)IO接口圖
軟體
如需軟件更新,請先查看我們的 Github。 https://github.com/elephantrobotics/myCobot
4.1 固件升級與恢復——我的工作室
我的工作室是我的機器人/菌群機器人的一站式平台。
我工作室的主要功能是:1)更新固件; 2) 提供如何使用機器人的視頻教程; 3)提供維修保養信息(如視頻教程、問答等)。
關於 myStudio 的 youtube 視頻的鏈接是: https://youtu.be/Kr9i62ZPf4w
如果您需要升級或維護您的菌群,請確保已設置開發環境。 如果沒有,請先安裝串口驅動程序,然後再嘗試使用該軟件。 下載鏈接如下:
官方的 web地點: https://www.elephantrobotics.com/myCobot/
GitHub: https://github.com/elephantrobotics/MyStudio/
如果您使用的是Windows系統,請選擇“my studio-windows.exe”下載,然後解壓到您的項目文件夾中。 注意不要將它與復雜的路徑一起使用,這可能會導致無法識別的路徑出現問題。
如果你的開發環境已經搭建好了,可以直接打開 file “我的Cobot。 可執行程序”。
打開後界面如下: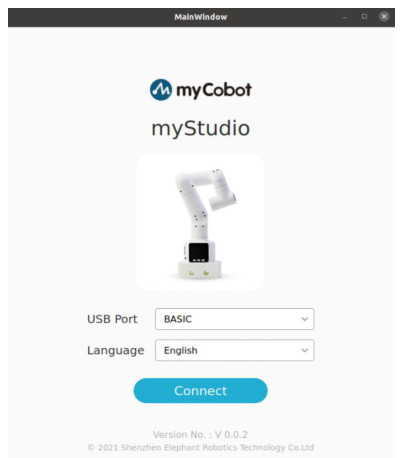
用“Basic”或“Atom”連接你的myCobot,選擇“語言”,然後點擊“連接”,進入主界面如下圖: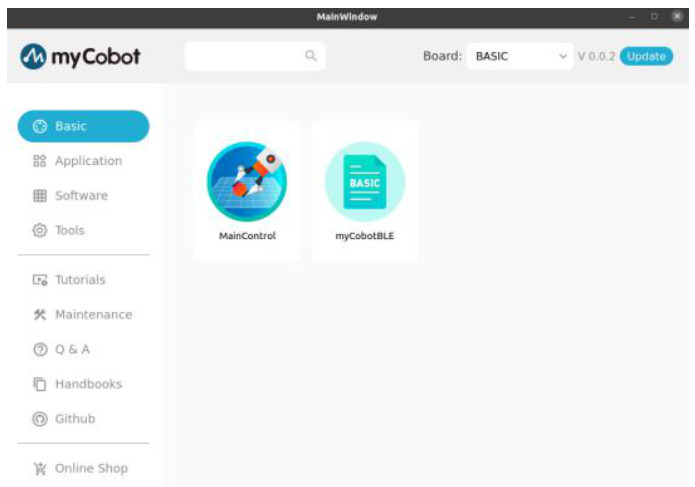
如果同時連接了Basic和Atom,在右上角的Board欄中再次選擇要燒錄的軟件,然後點擊Basic或Tools選擇要燒錄的固件。
4.2 內置軌跡記錄
M5STACK Basic主控板有3個按鍵,支持自定義編程和數據寫入。 這個程序是開源的,你可以查看我們的 GitHub。
拖動教學示範
- 錄音:進入錄音模式後,選擇錄音存儲位置

按鈕 A:存儲到 Ram
按鈕 B:存儲到存儲卡
按鈕 C:退出錄製模式 - 開始錄音

選擇存儲位置後,手動拖動機械臂完成目標動作,該動作將被記錄並存儲。 - 玩

按鈕 A:開始播放錄製的動作
按鈕 B:暫停
按鈕 C:退出播放
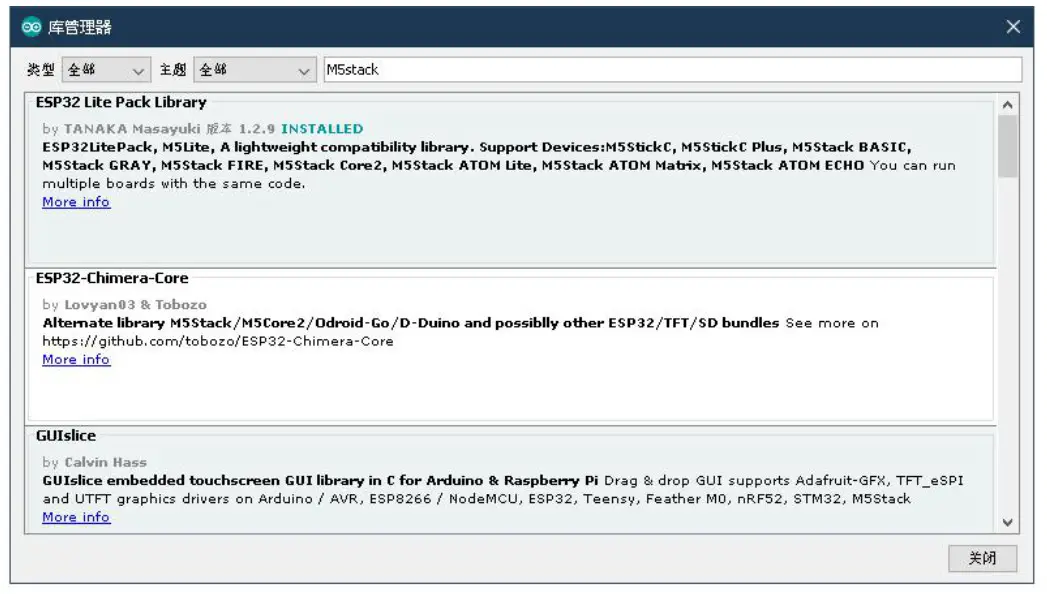
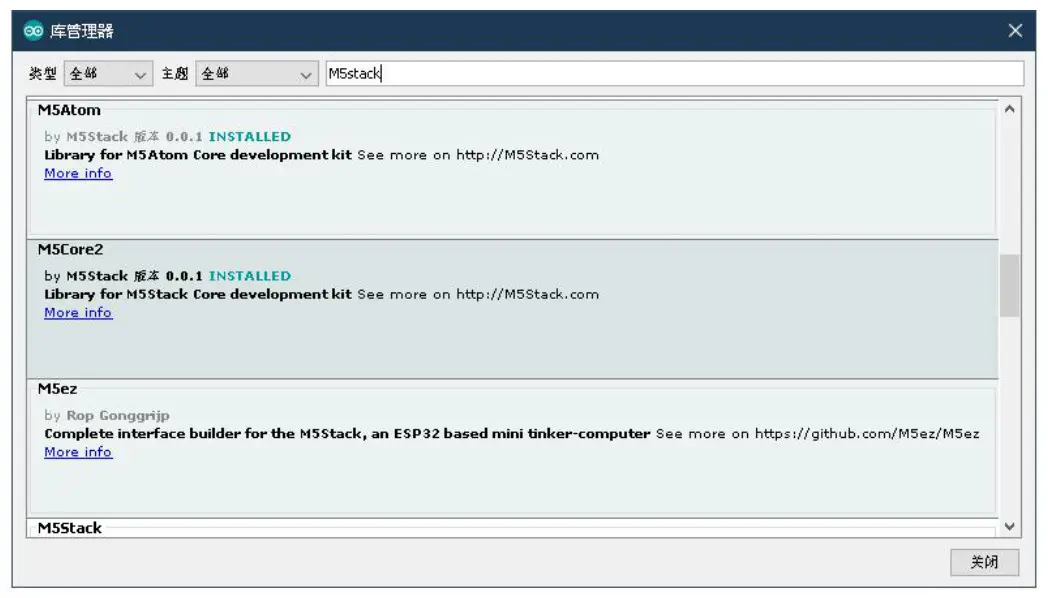
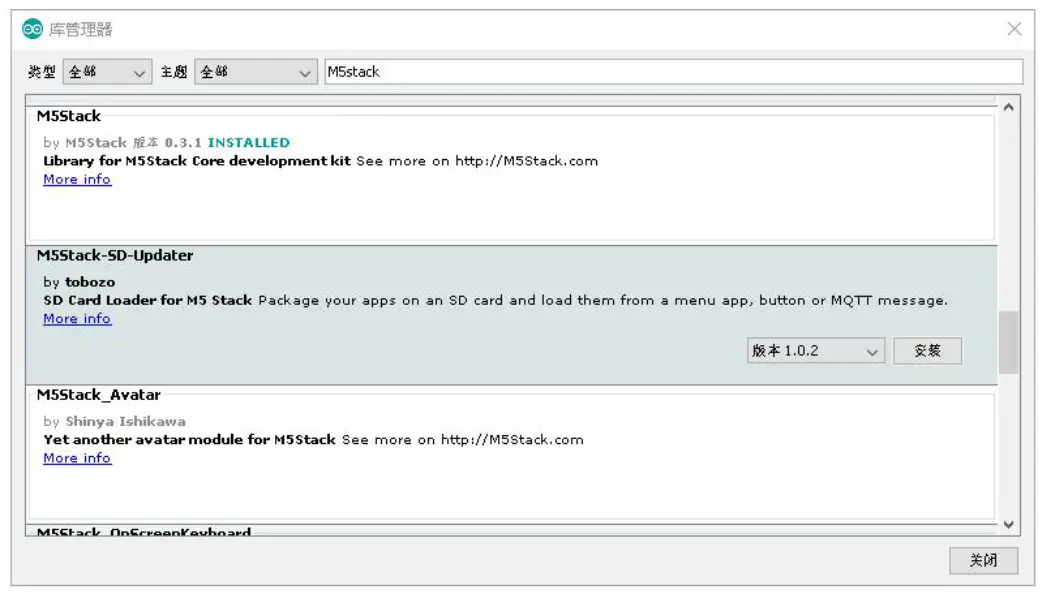
4.3 Arduino 庫
庫是代碼的集合,可讓您輕鬆連接和使用傳感器、顯示器、模塊等。例如ample,內置的LiquidCrystal庫可以實現與字符LCD顯示器的輕鬆通信。
使用該庫可以擴展Arduino開發板的功能。 由於庫的存在,我們可以輕鬆實現Arduino與外部硬件的協作或數據通信。 Arduino IDE預裝了一系列標準庫 files。 同時,您也可以將第三方庫(如從網上下載的開源庫)安裝並導入到Arduino IDE中。 您甚至可以創建庫並將它們導入 Arduino IDE。 該庫的存在幫助用戶繞過寄存器和地址指針等更專業的內容,大大降低了開發難度。 如果您需要了解如何為ARDUINO IDE的安裝添加第三方庫,請參考驅動安裝地址和方法: https://docs.m5stack.com/#/zh_CN/arduino/arduino_development 您還可以查看我們的 Github 以獲取更多信息。 https://github.com/elephantrobotics/myCobot
您還可以查看我們的 Github 以獲取更多信息。 https://github.com/elephantrobotics/myCobot
如下:
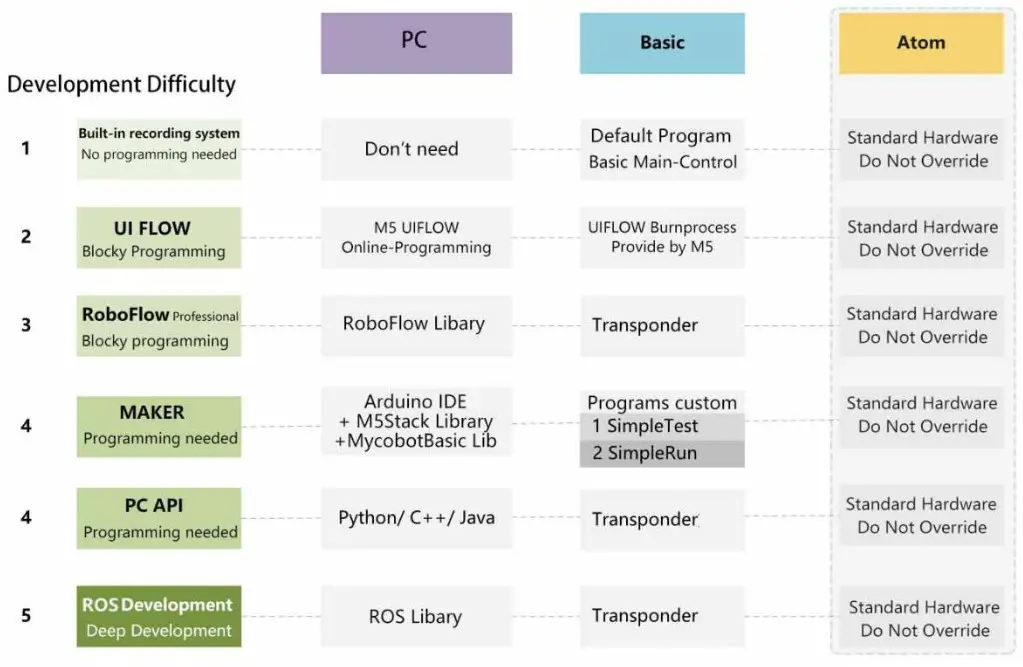
4.4 API接口與通信
- 單流
- Arduino
- 微型蟒蛇
- 自由腐爛
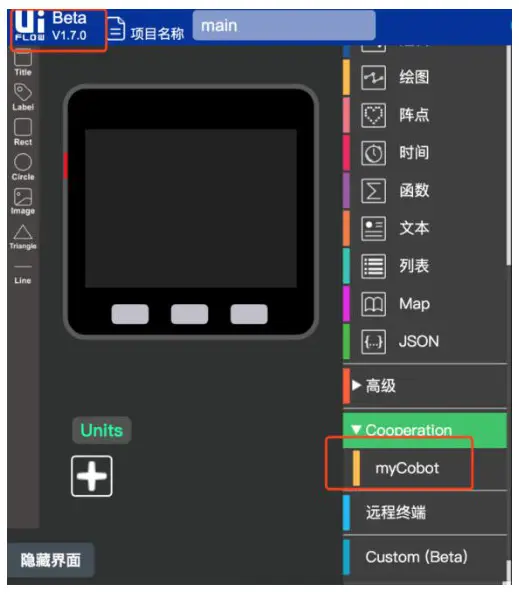
4.4.1 界面流
使用 UIFlow Beta 版本並選擇合作 – mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 活性氧
4.5 活性氧
ROS正在開發中,將根據進度進行更新。
截至 12.31 年:
- 更新了 ROS 設置,現在可以安裝 Python2 或 3。
- 改為手動輸入串口,Windows用戶可以直接運行。
- 更新 API 庫中新的接口規範文檔,請查閱“README”。
- 4.6 聯合校準
如果您的移動機器人需要校準關節,請先使用 mycobiota 或 Arduino 的固件等工具燒錄 Calibration。
上傳固件後,Basic界面如下圖:
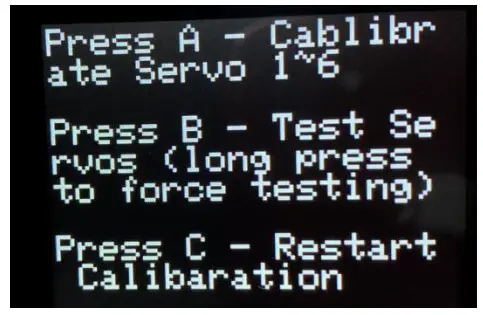
此時,將J1旋轉到與凹槽對齊的標準零位,按下A鍵(左鍵),J1將從動態運動進入靜態並固定在該標準零位。
重複此方法後的步驟以設置剩餘的 J2-J6。 J6設置好後,再次按A鍵(左鍵)保存所有設置。
當所有關節都回到標準零位後,還需要檢查myCobot是否可以正常運行。 按B鍵(中間鍵),我的機器人會依次檢測J1到J6。
請確保操作範圍內沒有障礙物或人員干擾,以防止在測試過程中損壞設備和人員。
可視化編程和工業軟件
5.1 可視化編程軟件-UIFlow
詳細使用請從以下鏈接獲取UI Flow操作手冊。
M5STACK 基本: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5STACK 原子: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 工業可視化編程軟件-RoboFlow
myCobot 支持由 Elephant Robotics 工業協作機器人操作的 RoboFlow。 RoboFlow的操作流程簡單易用,交互界面清晰易懂,方便用戶快速掌握和使用,有效幫助用戶高效完成操作和編程任務。 即使是新手用戶也可以通過簡單的操作實現目標功能。
詳細使用請從以下鏈接獲取 RoboFlow 操作手冊。
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
售後服務
- 退貨服務僅限於商品物流收貨之日起7日內未開封的商品。 退貨產生的運費或其他風險由客戶承擔。
- 客戶要求保修時,應提供購買發票和保修卡作為保修證明。
- 大像機器人將負責保修期內正常使用造成的產品硬件故障。
- 保修期自購買之日或物流收貨之日起計算。
- 產品的故障部件歸大像機器人所有,必要時將收取相應的費用。
如需申請保修服務,請先聯繫我們的客服確認詳細信息。 以下是詳細部件的保修條款:
筆記: 如與產品手冊有衝突,以用戶手冊為準。
a)伺服電機
| 保固期 | 保固服務 |
| ≤1個月 | Elephant Robotics 提供免費的新服務器電機並承擔運費。 |
| 1-3個月 | 大像機器人免費提供新服務器電機,運費由海關承擔 |
| ≥3個月 | 客戶需要自己購買。 |
b)電器零件(M5硬件)
| 保固期 | 保固服務 |
| ≤3個月 | 客戶拆機後需寄回,大像機器人免費寄出新的,並承擔運費到家。 |
| 3-6個月 | 客戶需拆裝後寄回,承擔運費到家, Elephant Robotics 將免費發送一個新的。 |
| ≥6個月 | 客戶需要自己購買。 |
c)結構件,包括殼件
| 保固期 | 保固服務 |
| ≤1年 | Elephant Robotics 提供一次免費的新組件,運費由海關承擔。 |
| ≥1年 | 客戶需要自己購買。 |
在交付產品的保修期內,本公司僅對機器人正常使用過程中出現的故障進行免費維修。 但是,在以下情況下,將向客戶收取維修費用(即使在保修期內):
- 因使用不當或與說明書不同的不當使用而造成的損壞或故障。
- 客戶擅自拆卸造成的故障。
- 因調整不當或未經授權的維修而造成的損壞。
- 損壞是由地震和洪水等自然災害造成的。
請嚴格按照本手冊及相關手冊中的說明操作機器人。
問與答:
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
Q:編譯器找不到對應的設備?
A:需要搭建好開發環境,安裝相應的工程庫,才能開發設備。
問:編譯器無法編譯 sample程序正確找到相應的設備?
A:需要的項目庫沒有安裝或者與項目庫有衝突。 請先檢查項目庫是否安裝正確。 如果安裝正確但仍無法編譯,請重新安裝Arduino開發環境。
Q:將固件燒錄到ATOM後設備無法正常工作?
A: ATOM 終端的固件需要使用我們的出廠固件。 如果誤燒了其他固件,可以選擇“myCobot ATOM ATOMMAIN”來燒錄ATOM終端。
Q:垂直位置有輕微晃動,但在運動狀態下沒有?
A:請檢查我的機器人是否處於垂直狀態。 菌群在垂直狀態下不受重力影響,機械空隙會導致輕微的擺動。 但是當它脫離垂直狀態時不會有擺動。 垂直狀態下推薦速度為400-500。
Q:ROS系統以後會收費嗎?
A:ROS 是開源的,會更新到我們的 Github。 固件升級不收取任何費用。
聯絡我們
如果您有任何需要幫助,請聯繫我們,如下所示。
深圳市大像機器人科技有限公司
地址:中國深圳南山雲谷創新產業園二期B7
電子郵件: support@elephantrobotics.com
電話:+86(0755)-8696-8565(工作日9:30-18:30)
Web地點: www.elephantrobotics.com
推特:CobotMy

文件/資源
 |
Elephant Robotics MyCobot 六軸協作機械臂 [pdf] 使用者手冊 MyCobot,六軸協作機器人手臂,MyCobot 六軸協作機器人手臂,V20210309 |



